
OK this s**t just got real.
Using my programming experience in X-Plane, Linux, and flight-hardened hardware, I am now building some real avionics.
Artificially-intelligent avionics.
Like: Hit-a-red-button-and-the-airplane-will-bring-itself-down-to-the-best-runway-using-artificial-intelligence avionics.
Here is the deal:
I have heard of too many cases of people having icing, or engine failures, in instrument weather and just having no decent way to survive the resulting situation.
Too many cases of people getting batted in the face by birds and not being able see well enough to fly the plane.
Too many cases of having engine failures or fuel exhaustion or ice in the engine air inlets and just not being able to set up a proper glide down to the airport.
And I realized I could CODE my way through those situations.
Here is how:
Imagine that as you fly, you have a piece of back-up avionics in your airplane that is hooked up to a GPS and attitude system to always know exactly where it is. Imagine that this system also has a terrain and airport and obstacle database, so it knows where the airports are that you might land at (including all runway lengths, widths, and directions), and all the terrain and obstacles between you and those runways. Now imagine that as you fly, the computer in this backup system is showing you a synthetic image of this world, AND IS CONSTANTLY IMAGINING THAT YOUR ENGINE JUST QUIT. In response to this paranoid fear, the computer is CONSTANTLY running it's own little internal FLIGHT SIMULATOR that is GLIDING DOWN TO A RUNWAY AND LANDING, flying a little simulated version of your airplane down to said runway. As well, imagine that this little simulator is simulating a glide down to EVERY RUNWAY, IN EVERY DIRECTION, AT EVERY AIRPORT, within gliding range of the airplane. Imagine that this little flight simulator is simulating EVERY POSSIBLE CHOICE YOU COULD MAKE TO GLIDE DOWN IF THE ENGINE QUIT, and ESTIMATING A CHANCE OF SUCCESS FOR THAT RUNWAY CHOICE, based on the runway length, width, flatness, elevation, proximity to you, headwind, crosswind, and expected air traffic at that runway. Then, imagine that AFTER this system has simulated a power-off glide to EVERY RUNWAY IN EVERY DIRECTION AT EVERY AIRPORT WITHIN GLIDING DISTANCE, estimating the chance of a successful power-off landing at that field, it were to MEMORIZE THAT MOST-LIKELY SUCCESSFUL POWER-OFF APPROACH AND SHOW IT TO YOU AS HOOPS IN THE SKY THAT YOU CAN FLY THROUGH TO GLIDE TO THAT RUNWAY WITHOUT ENGINE POWER. Imagine that this system builds the power-off constant-glide instrument-approach that starts at your current location and terminates at the runway that is most likely to result in a safe glide down to landing... in an EYE-BLINK.
Can you imagine such a system? What would it look like?
Perhaps, just exactly like this:
Laminar Research has been working in secret with Vertical Power for the last year, and the hardware is undergoing flight-test now.
Microsoft Flight gives you jewels in the sky to fly through.
So do we.
But ours are in a real airplane, and will take you down to a runway if the engine quits.
Look at the picture above to see a typical scenario, with the display hooked (of course!) to a copy of X-Plane with an engine-failure activated.
You can see the hoops that you should fly through to take you to KBFI: The best airport to land at if the engine quits. The color of KBFI (green) indicates that it is a VERY good airport to glide down to (the runway is long, wide, pointed into the wind, and is close enough to surely glide to). KRNT is also green, so is also a good choice. KSEA is YELLOW (OOPS!) so is NOT as good a choice. (This is because the high traffic-density at KSEA would constitute a possible mid-air scenario if you were to glide in there power-off... this system is designed to avoid such busy airports if less-busy airports can be safely reached). So an interesting thing here is that this system (called the "Runway Seeker") does NOT always take you to the CLOSEST airport!!! The CLOSEST airport is NOT always the BEST airport!!! If you can easily still make it to a much longer, wider runway, pointed right into the wind, then that more-distant airport could still be a much better choice than a closer airport with a short, narrow runway and a cross-wind! Imagine that you are at 15,000 feet, within easy gliding distance of Edwards Air Force base, and the engine quits. Which airport is better to glide to? Edwards or the little dirt ranch strip that might be a little closer? We all know the right answer to that question, but nobody ever considers these things when they have an emergency in flight.
Every time an engine-out emergency is declared, the first thing ATC says is "the closest airport is _____". And often, ATC is wrong about what airport is actually closest!
Does the controller consider the WIND when he suggests the closest airport to you? Does he know that downwind airports may be more likely to be obtainable than upwind airports?
Does the controller know the RUNWAYS at the airport he suggests? Does he consider the length and width of each runway? It's headwind? It's crosswind? Your ability to really make it there?
If you have an engine failure and go for the closest airport, are you setting yourself up for a crash on a tiny strip, when a much bigger runway, slightly farther away, was still within gliding distance?
Do you know how many times you will circle down before turning final? Do you know how the wind will really affect your power-off path?
If you deploy a parachute, do you have any idea where you will land? Can you land, under your parachute, on an airport runway?
And what if YOU are the one that quit? Your heart? A stroke? An oxygen system? Will your plane fly itself to the best runway if YOU quit functioning?
The answers are no, no, no, no, no, no, NO!!!!!!!
HOW could we have such incredible flight simulators and computers and artificial intelligence and accept such an incredibly crude, un-tested, almost-useless answer as "Uhhh... I think this is the closest airport" when we need to have a successful emergency landing?
Well, starting now, we don't have to.
I wrote the Runway Seeker on my Mac, converted it over to actual in-flight hardware running on Linux, and have been testing the system extensively by having it rescue X-Plane from countless simulated engine failures.
I actually set up a test mode where X-Plane would be connected to the Runway Seeker via ethernet cables, and X-Plane would trigger an engine failure and "push the red button", causing the Seeker to engage and bring X-Plane in for an A-I controlled approach, and the success or failure of the approach and landing would be auto-recorded... and another random flight set up with an engine that would then fail again moments later. On and on the simulations would run into the night, with no human intervention at all, simulating failure after failure after failure, all over the continental United States at random speeds, headings, and altitudes. Over and over the engine would quit and the Seeker would engage, selecting the best airport and runway and taking control of the autopilot, bringing the simulated airplane in for landing. Dozens of scenarios tested.. and then hundreds... and then thousands. Each simulation a test of what would happen if a pilot had an engine failure and then pushed the red button in reality.
How did it go? In the SIMULATOR:
The success-rate in bringing the plane in for a BUMPY BUT NON-DAMAGING LANDING IN THE SIMULATOR, IF WITHIN GLIDING RANGE OF AN AIRPORT: 90%.
The success-rate in bringing the plane TO A 200-FT DECISION-HEIGHT RIGHT IN FRONT OF THE RUNWAY THRESHOLD AT APPROACH SPEED, HEADING, AND GLIDEPATH IN THE SIMULATOR, IF WITHIN GLIDING RANGE OF AN AIRPORT: 100%.
So this system is constantly imagining the worst as you fly, re-building ABOUT 30 POSSIBLE INSTRUMENT APPROACHES PER SECOND, each one going from the nose of your airplane to a nearby runway, and memorizing the approach that is most likely to result in a successful landing, and showing you that approach as a series of hoops. And, if you hit the red button, the servos will engage and the plane will fly those hoops for you... down to an approach gate with a predicted success rate of about 100%, and, if needed, to landing at a predicted success rate of about 90% in the SIMULATOR. (I keep putting the words SIMULATOR in all-caps, because things are bound to go a lot different in the real airplane!)
And, of course, this system works EXACTLY as well in instrument conditions, and at NIGHT, as on a perfect clear day. After all... it does not SEE! It only KNOWS.
Night flight. Instrument conditions. In the weather. Engine failure. Pilot incapacitation. How does a 100% success rate in getting you to a 200-foot decision height sound? (IF you were flying high enough to BE WITHIN GLIDING DISTANCE of an airport!) How does a 90% success rate in getting the thing on the GROUND in one piece sound?
I wrote X-Plane, and it is, in many ways, the best flight simulator in the world.
Vertical Power makes the VP line of avionics for homebuilts, and they have a reputation of being the most solid and reliable hardware providers in home-built aviation.
For the last year we have been working together in secret to build this system, and we are bringing it to light of day now. This system is performing excellently in extensive simulations hooked to X-Plane within the offices of Laminar Research. And the flight hardware is being flown in a real airplane operated by Vertical Power. Within the next few weeks, we start to accumulate data on power-off success-rates in the real airplane.
Then, of course, this system will go in my Evolution, which we are actually calling a (R)Evolution, because this is one of the first manned airplanes that I know of that is artificially intelligent, and will use that A-I to bring itself down safely if I or the engine quit functioning in flight.
The system is called the Vertical Power VP-400. See it here:
http://verticalpower.com/vp-400/
I ain't takin' no prisoners. It is ON. If I SEE a way to make aviation better, I am DOING it... and DAMN convention.
Now, how about a few more screenshots?
Here we are (in the actual Runway Seeker application, hooked to a copy of X-Plane) near KTEX. The engine just quit. You can see that you can easily make KTEX... just follow the hoops! You even have the altitude to make a 360 on final. Note that KTEX is yellow: The runway is not quite as long and wide as we might like, and the energy (speed and altitude) you have is just a bit lower than we would like! It is still the best choice, though, compared to the other airports, which are orange (BAD choice to land!) or red (cannot even make it!)
Observe the terrain color. Terrain is colored based on your probability of being able to glide there, based on terrain elevation, your elevation, and the wind! You can see at-a-glance what you can glide to.
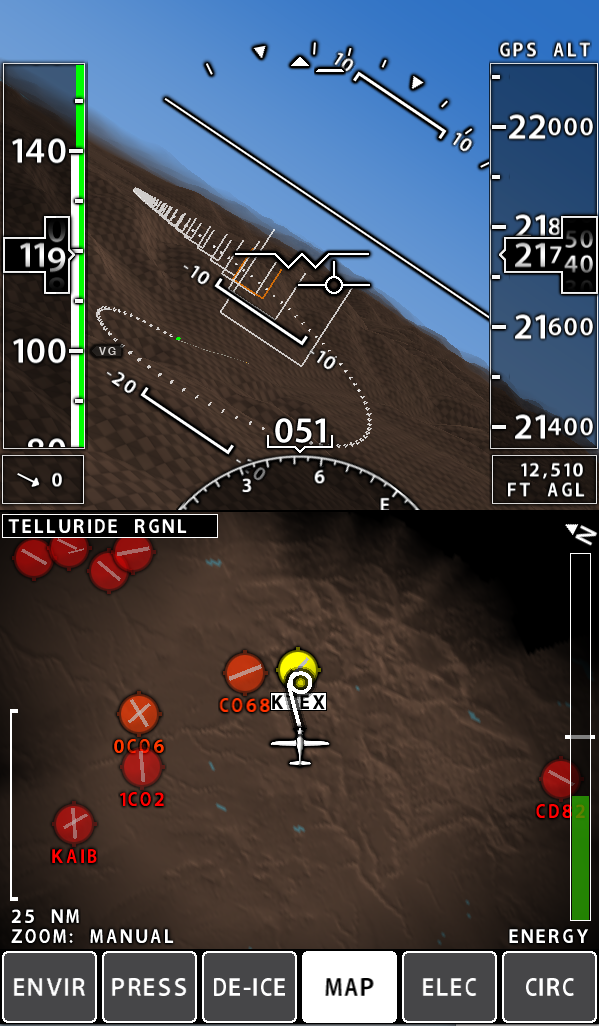
The system will also be hooked up to a FLIR camera... just touch the screen to toggle back and forth between synthetic imagery and FLIR. This system will sit BETWEEN the Garmin G900 left and right displays, so for night approaches, it will provide night-vision right in the center of the cockpit, without over-laying any useful info on the Garmins. Note the ENVIRONMENT, PRESSURIZATION, DE-ICE, ELECTRIC, AND CIRCUIT-BREAKER buttons. Those buttons take you to the relevant pages to replace the map and let you control your various aircraft systems. This system is designed to complement the Garmin G900 in any homebuilt, and completely replace the Moritz display currently used on Lancair Evolutions.

Look below! The CLOSEST airport is not always the BEST one!
KAVX is ORANGE but KNUC is GREEN! That is because it has a longer, wider runway... a better choice than KAVX! AND, you CAN glide there even with a few 360's on short final! NOBODY would ever think to try this after an engine failure without this program in their airplane. So what is REALLY so bad about KAVX? Anyone that has flown their knows... it is a tricky little sloped runway on a cliff! The seeker DOES consider also the FLATNESS of the runway according to it's terrain database, and KAVX loses points here as well!

But, if you are LOW, then KAVX is your only option! So the Seeker chooses it. Observe the "rays" of darkness in the water on the far side of the island... the water is darker there because there is less chance you can MAKE IT THAT FAR... because the mountains are in the way!

And here in the So-Cal area at a typical altitude for any airplane. So many choices if the engine quits! The best one here is MIRIMAR!!
Hey, if the engine quits, then we get to visit Top Gun! And there will be no injury... I AM QUITE CERTAIN OF THAT! The entire gliding approach is already mapped out to the last detail!

So, this is the new VP-400 by Vertical Power with the Runway Seeker written by me, Austin Meyer, or Laminar Research.
We will have it for sale for all homebuilts some time this year... and I will keep you posted on the A-I auto-land success rates in the real airplane. You can see it at the Vertical Power booth at Sun-N-Fun right NOW.
And hey: If you ever see my Evolution come in for a landing at your local airport and there is nobody on board... don't worry: I just called for my airplane to come pick me up.